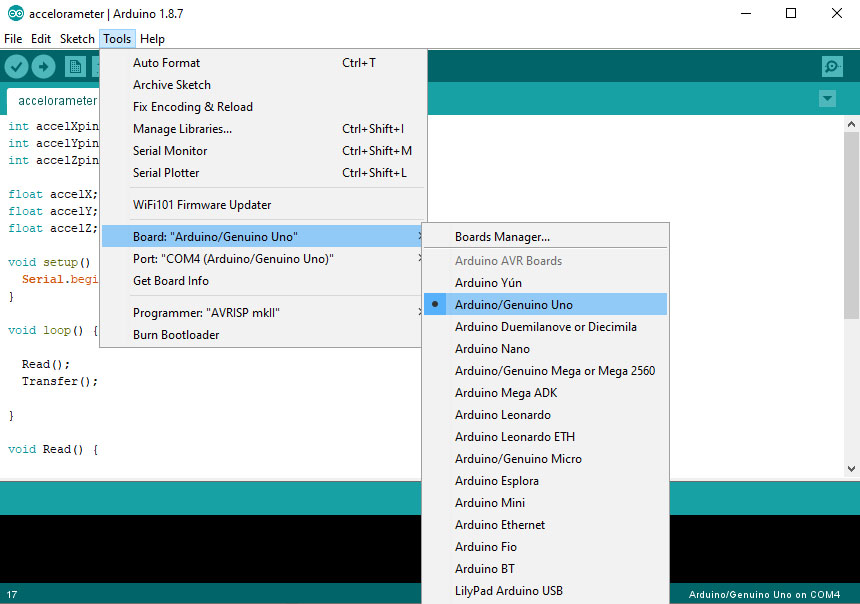
First thing you will need to do is select the board you are using.
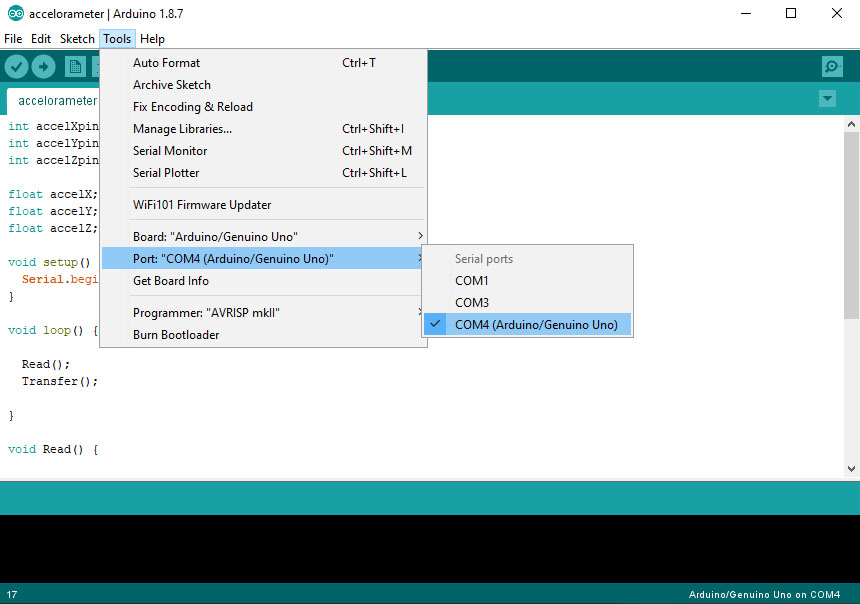
Next make sure you have the port selected that your board is connected to.
You will be using an accelerator for these sketches. Here is a link to a set up guide.
int accelXpin = A0;
int accelYpin = A1;
int accelZpin = A2;
float accelX;
float accelY;
float accelZ;
void setup() {
Serial.begin(9600);
}
void loop() {
Read();
Transfer();
}
void Read() {
accelX = analogRead(accelXpin);
accelY = analogRead(accelYpin);
accelZ = analogRead(accelZpin);
}
void Transfer() {
Serial.print(accelX);
Serial.print(",");
Serial.print(accelY);
Serial.print(",");
Serial.print(accelZ);
Serial.println();
}
import processing.serial.*;
Serial myPort;
float inX;
float inY;
float inZ;
float bX;
float bY;
float bZ;
int check = 0;
float sensors[];
int ch = 0;
String myString;
void setup(){
size(800,500);
String portName = Serial.list()[2];
myPort = new Serial(this, portName, 9600);
myPort.bufferUntil('\n');
}
void draw(){
background(0);
stroke(255);
noStroke();
fill(80);
rect(100,40,400,20);
rect(100,80,400,20);
rect(100,120,400,20);
textSize(12);
fill(255);
textAlign(RIGHT);
text("X AXIS",90,55);
text("Y AXIS",90,95);
text("Z AXIS",90,135);
/// 3 axis of the accelorometer
fill(0,255,255);
rect(290 + (bX-inX)/2,40,inX-bX,20);
rect(290 + (bY-inY)/2,80,inY-bY,20);
rect(290 + (bZ-inZ)/2,120,inZ-bZ,20);
if(inX > 0 && check == 0){
bX = inX;
bY = inY;
bZ = inZ;
check = 1;
}
if (myString != null) {
myString = trim(myString);
float sensors[] = float(split(myString, ','));
inX=sensors[0];
inY=sensors[1];
inZ=sensors[2];
}
}
void serialEvent(Serial myPort) {
// read the serial buffer:
myString = myPort.readStringUntil('\n');
}
import processing.serial.*;
Serial myPort;
float inX;
float inY;
float inZ;
float bX;
float bY;
float bZ;
int check = 0;
float sensors[];
int ch = 0;
String myString;
void setup(){
size(800,500, P3D);
String portName = Serial.list()[2];
myPort = new Serial(this, portName, 9600);
myPort.bufferUntil('\n');
}
void draw(){
background(0);
stroke(255);
noStroke();
fill(80);
rectMode(CORNER);
rect(100,40,400,20);
rect(100,80,400,20);
rect(100,120,400,20);
textSize(12);
fill(255);
textAlign(RIGHT);
text("X AXIS",90,55);
text("Y AXIS",90,95);
text("Z AXIS",90,135);
/// 3 axis of the accelorometer
fill(0,255,255);
rect(290 + (bX-inX)/2,40,inX-bX,20);
rect(290 + (bY-inY)/2,80,inY-bY,20);
rect(290 + (bZ-inZ)/2,120,inZ-bZ,20);
if(inX > 0 && check == 0){
bX = inX;
bY = inY;
bZ = inZ;
check = 1;
}
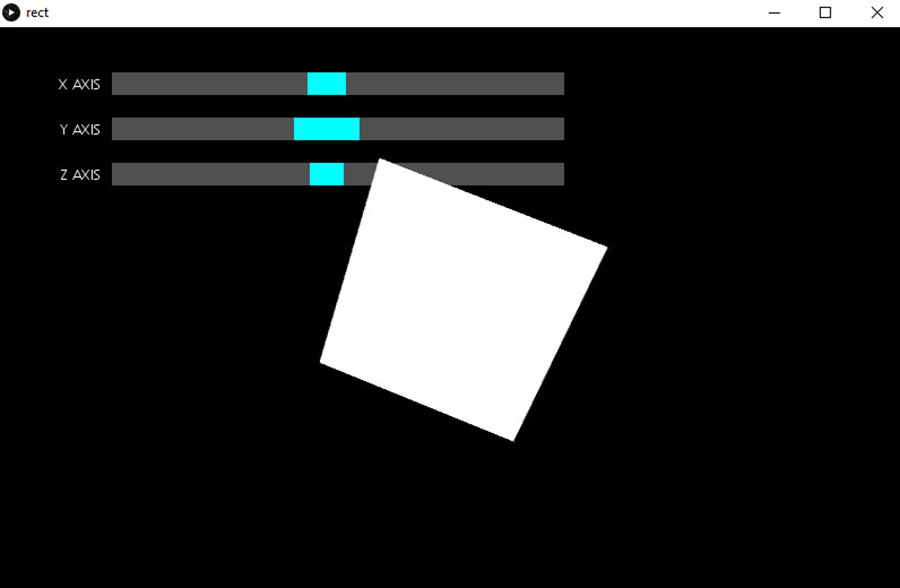
pushMatrix();
translate(width/2,height/2);
rotateX(radians(inX));
rotateY(radians(inY));
rotateZ(radians(inZ));
fill(255);
rectMode(CENTER);
rect(0,0,200,200);
popMatrix();
if (myString != null) {
myString = trim(myString);
float sensors[] = float(split(myString, ','));
inX=sensors[0];
inY=sensors[1];
inZ=sensors[2];
}
}
void serialEvent(Serial myPort) {
// read the serial buffer:
myString = myPort.readStringUntil('\n');
}
import ddf.minim.*;
import ddf.minim.ugens.*;
import processing.serial.*;
Serial myPort;
Minim minim;
AudioOutput out;
Oscil wave;
float inX;
float inY;
float inZ;
float bX;
float bY;
float bZ;
int check = 0;
float sensors[];
int ch = 0;
String myString;
void setup(){
size(800,500);
minim = new Minim(this);
// use the getLineOut method of the Minim object to get an AudioOutput object
out = minim.getLineOut();
// create a sine wave Oscil, set to 440 Hz, at 0.5 amplitude
wave = new Oscil( 440, 0.5f, Waves.SINE );
// patch the Oscil to the output
wave.patch( out );
String portName = Serial.list()[2];
myPort = new Serial(this, portName, 9600);
myPort.bufferUntil('\n');
}
void draw(){
println(myString);
background(0);
stroke(255);
strokeWeight(1);
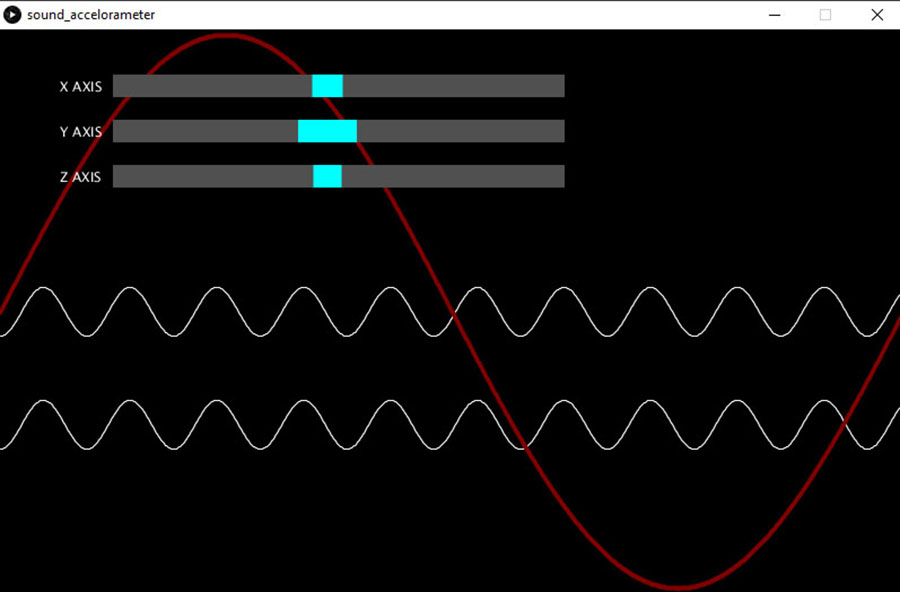
// draw the waveform of the output
for(int i = 0; i < out.bufferSize() - 1; i++)
{
line( i, 250 - out.left.get(i)*50, i+1, 250 - out.left.get(i+1)*50 );
line( i, 350 - out.right.get(i)*50, i+1, 350 - out.right.get(i+1)*50 );
}
// draw the waveform we are using in the oscillator
stroke( 128, 0, 0 );
strokeWeight(4);
for( int i = 0; i < width-1; ++i ) {
point( i, height/2 - (height*0.49) * wave.getWaveform().value( (float)i / width ) );
}
noStroke();
fill(80);
rect(100,40,400,20);
rect(100,80,400,20);
rect(100,120,400,20);
textSize(12);
fill(255);
textAlign(RIGHT);
text("X AXIS",90,55);
text("Y AXIS",90,95);
text("Z AXIS",90,135);
/// 3 axis of the accelorometer
fill(0,255,255);
rect(290 + (bX-inX)/2,40,inX-bX,20);
rect(290 + (bY-inY)/2,80,inY-bY,20);
rect(290 + (bZ-inZ)/2,120,inZ-bZ,20);
if(inX > 0 && check == 0){
bX = inX;
bY = inY;
bZ = inZ;
check = 1;
}
if (myString != null) {
myString = trim(myString);
float sensors[] = float(split(myString, ','));
inX=sensors[0];
inY=sensors[1];
inZ=sensors[2];
}
float amp = map( bX-inX, -200, 200, 1, 0 );
wave.setAmplitude( amp );
float freq = map( bZ-inZ, -200, 200, 110, 880 );
wave.setFrequency( freq );
}
void keyPressed()
{
switch( key )
{
case '1':
wave.setWaveform( Waves.SINE );
break;
case '2':
wave.setWaveform( Waves.TRIANGLE );
break;
case '3':
wave.setWaveform( Waves.SAW );
break;
case '4':
wave.setWaveform( Waves.SQUARE );
break;
case '5':
wave.setWaveform( Waves.QUARTERPULSE );
break;
default: break;
}
}
void serialEvent(Serial myPort) {
// read the serial buffer:
myString = myPort.readStringUntil('\n');
}